|
|
|
Tecnologías de Rehabilitación |
|||||||||||

|
|||||||||||
|
Plataforma UVa-NTS (Universidad de Valladolid - Neuromuscular Training System) En este apartado se recoge información sobre el desarrollo de un sistema que permite el entrenamiento de personas que emplean prótesis mioeléctricas, debido a la amputación de una extremidad superior. Con este sistema se pretende facilitar la adaptación de estas personas al empleo de la prótesis que vayan a emplear, para ello se han usado trabajos relacionados con el control neuromuscular, que se han realizado en el laboratorio de electrónica y bioingeniería. Este proyecto ha sido realizado en el marco de la Escuela Técnica Superior de Ingenieros de Telecomunicación (ETSIT) de la Universidad de Valladolid (UVa). Además, el uso de esta plataforma de entrenamiento neuromuscular permitiría a un usuario el control de un ordenador personal, de entornos virtuales o de sistemas domóticos mediante el empleo únicamente de señales bioeléctricas de electromiograma (EMG). Asimismo, la aplicación de visualización de señales permite monitorizar diferentes biopotenciales así como ayudar al diagnósitoc de enfermedades a médicos especialistas. 
Componentes del sistema El sistema se encuentra compuesto por los siguientes componentes: • Cabecera analógica. Este componente se encarga de recoger las señales eléctricas generadas en el cuerpo humano, las cuales son tomadas mediante electrodos de superficie. El último prototipo desarrollado, tras casi 20 años trabajando en la línea de investigación, posee cuatro canales de adquisición y emplea un conjunto de etapas destinadas al acondicionamiento de la señal. Este conjunto de etapas presenta unas altas prestaciones utilizando pocos componentes electrónicos, pudiéndose configurar altas ganancias de hasta 100000 y bajas frecuencias de corte paso alto hasta 0,016Hz. El resultado final es una cabecera de adquisición compacta que otorga una gran flexibilidad de operación para trabajar con biopotenciales como el electrocardiograma (ECG), electromiograma (EMG) e, incluso, el electroencefalograma (EEG). • Conversor analógico/digital (A/D). La cabecera analógica diseñada así como el software, permiten trabajar con sistemas de adquisición tanto por puerto USB, serie, paralelo mediante los correspondientes convertidores adapatados o utilizando tarjetas de adquisición comerciales como la tarjeta CIO/DAS 1600 de la casa ComputerBoards. • Ordenador y entorno gráfico empleado. Los datos digitalizados mediante el empleo de el conversor A/D, se dirigen a un ordenador, en el que se encuentra la parte software. Este software está encargado de comprobar el estado de las señales, realizar su procesado y en caso requerido también puede realizar tareas de acondicionamiento de la señal. Además, es esta parte del sistema la encargada de ofrecer un entorno gráfico que permita al usuario realizar el entrenamiento. Entre las aplicaciones incluidas actualmente se encuentra un visualizador de las señales adquiridas, un control de movimiento en un espacio bidimensional, un control de un brazo virtual con seis grados de libertad y un videojuego de juego del ping-pong. Control neuromuscular Dentro del laboratorio se han desarrollado una serie de sistemas relacionado con el control neuromuscular, basados en la adquisición y tratamiento en tiempo real de señales voluntarias procedentes de la actividad muscular. Estas señales pueden ser tanto señales mioeléctricas, como por ejemplo, el electromiograma (EMG) como señales miomecánicas, de tipo mecanomiograma (MMG). Mediante estas investigaciones se han conseguido diferentes objetivos: • Desarrollo de sistemas gráficos de entrenamiento basados en control neuromuscular. • Desarrollo de sistemas de bajo coste para control neuromuscular, reduciendo el empleo de componentes tecnológicos específicos. • Desarrollo de plataformas interactivas para procesado de señales, así como para la verificación de este procesado en tiempo real y la adaptación de sistemas neuromusculares. • Aplicación de estos sistemas en personas tanto discapacitadas como sujetos de control, convirtiéndolos en un elemento que sirva de intermediario entre el hombre y la máquina, es decir, una interfaz humano-máquina. Entre las aplicaciones anteriormente mencionadas se incluye un sistema de entrenamiento de prótesis mioeléctricas en el que se dispone de una plataforma interactiva mediante la cual se procesan señales mioeléctricas en tiempo real. Se ofrece al usuario un entorno gráfico, que como se ha mencionado anteriormente representa un brazo humano virtual, que le permite comprobar la correcta realización de ciertos movimientos (codo: extensión y flexión, muñeca: extensión, flexión, pronación y supinación), con lo que se pretende facilitar su adaptación al manejo de una prótesis de una extremidad superior. La aplicación de navegación por un espacio bidimensional puede emplearse para habituarse al control de un sistema empleando la interfaz humano-máquina construida. Esta aplicación constituiría, además, un claro antecedente al control de un ordenador personal utilizando la interfaz para el manejo del ratón. Finalmente, el videojuego de ping-pong permite a un usuario mantener el control de una pelota entre dos paletas manejadas utilizando esfuerzos voluntarios de diferentes músculos. En este caso, la aplicación puede ser utilizada para tareas de rehabilitación utilizando un ejercicio atractivo para el usuario conociendo la evolución objetiva mediante los resultados estadísticos conseguidos en sesiones consecutivas.
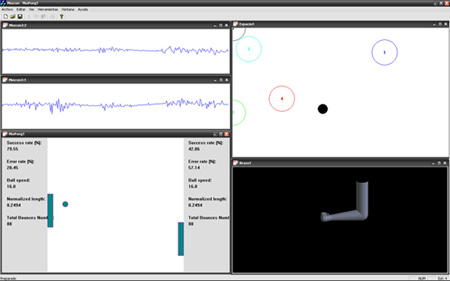
En la figura de la derecha anterior se puede observar un sujeto de control con los electrodos colocados para la adquisición de dos canales de electromiograma EMG. Estos electrodos están encargados de recoger las señales que van a ser acondicionadas y procesadas en la plataforma UVA-NTS. Una vez que estas señales llegan al ordenador el software presentado en la anterior figura de la izquierda entrará en funcionamiento. En él se encuentran en funcionamiento las cuatro aplicaicones incluidas actualmente. Arriba a la izquierda, puede verse el visualizador de señales bioeléctricas para los dos canales. Arriba a la derecha, se encuentra el navegador bidimensional que permite configurar diferentes estados o dianas. Abaja o la izquierda, el videojuego de ping-pong en funcionamiento. Finalmente, abajo a la derecha el brazo virtual con 6 grados de libertad. |
|||||||||||

|
|||||||||||
|
Dr. Alonso Alonso Alonso
ETS Ingenieros de Telecomunicación - Universidad de Valladolid |