

|
|
|
Tecnologías de Rehabilitación |
||

|
||

El área de Tecnologías de Rehabilitación (TR), dedica sus funciones a la investigación de tecnologías relacionadas con aplicaciones médicas o destinadas a la rehabilitación. En este ámbito desarrollan su trabajo tanto profesores como investigadores y alumnos de la Escuela Técnica Superior de Ingenieros de Telecomunicación de la Universidad de Valladolid, investigando y desarrollando tanto equipos electrónicos, como la programación y los entornos virtuales que éstos requieren para trabajar. Interfaces humano-máquina orientadas a las Tecnologías de Rehabilitación 
Interfaces aferentes Las interfaces aferentes son aquellos dispositivo encargados de captar señales de una determinada naturaleza y llevarlas hacia un núcleo central de un sistema electrónico. Dentro de este tipo de interfaces se está trabajando en el desarrollo de equipos con propósitos diferenciados captando señales de diferente naturaleza: - Adquisición de señales bioeléctricas - Adquisición de señales biomecánicas 
Interfaces eferentes Las interfaces eferentes son auqellas que sintetizan una serie de señales en el núcleo del dispositivo y las trasmita, de alguna forma, hacia su exterior. En este grupo de interfaces se están, actualmente, desarrollando dispositivos enfocados a diferentes tipos de estimulación: - Electroestimulación funcional Estas interfaces, aferentes y eferentes, son utilizadas conjuntamente o para interactuar con otros dispositivos, consiguiendo sistemas TR de propósito general o específico, facilitando la realización de tareas de rehabilitación, movilidad o comunicación. Sistemas asistidos y de rehabilitación 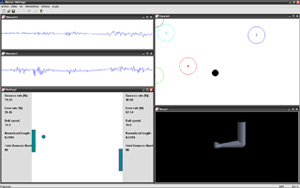
Plataforma UVa-NTS - Sistema de entrenamiento virtual basado en electromiograma (EMG) Se trabaja en el desarrollo de diferentes sensores destinados a detectar la actividad bioeléctrica muscular, para su empleo en el estudio de ciertos trastornos neuromusculares. Estos sensores son capaces de adquirir ciertas señales, que pueden se procesadas con las herramientas de análisis en tiempo real disponibles, como son la teoría del caos y los wavelets, para posteriormente ser empleadas para el control de sistemas virtuales o reales, tareas de rehabilitación y para la ayuda en los diágnosticos médicos. Sistema de control adaptado para sillas de ruedas eléctricas Partiendo de diferentes tipos de interfaces de detección de señales biomecánicas se ha implementado un sistema de movilidad adaptado a personas con discapacidades motoras severas. Este sistema emplea guiños de los ojos, capacidad remanente en gran cantidad de casos para el guiado de una silla de ruedas eléctica. La interacción con el sistema de guiado convencional de joystick se realiza de forma mecánica y externa a éste. Este sistema es de especial importancia para aquellas personas que, debido a sus problemas de movildiad, precisan de una atención continuada, ya que el equipo les dotará de una mayor independencia. 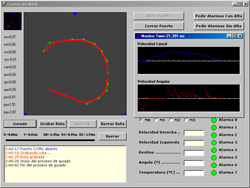
Desarrollo de un sistema automático de guiado para sillas de ruedas En esta iniciativa se lleva a cabo un trabajo orientado a realizar una aplicación, que permita ayudar a discapacitados, partiendo de una aplicación más general destinada a manejar robots en entornos controlados. Este sistema, en que se basa el desarrollo, está recogido en una patente de la Universidad de Valladolid. Se está trabajando también en la realización de un sistema de guiado para una silla de ruedas destinada a grandes discapacitados que precisan de una atención continuada.
Sistema de vigilancia y telepresencia para discapacitados motores Al igual que para el sistema de movilidad adaptado se ha partido de las interfaces aferentes de adquisición de señales biomecánicas para el control de un robot que incorpora una cámara web inalámbrica. Este robot recoge imágenes de las diferentes ubicaciones en las que se encuentra y éstas son enviadas al discapacitado mediante tecnología inalámbrica que puede verlas en su ordenador personal. Además, se ha incorporado un control adicional para un cuidador que permite el control remoto del robot así como la visualización de la imagen recogida en el entorno del usuario discapacitado. 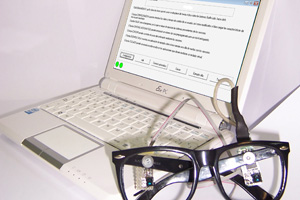
Sistema de comunicación aumentativa Este dispositivo permite a un usuario discapacitado controlar un ordenador personal. Para ello se ha empleado la interfaz aferente de adquisición de señales biomecánicas y, mediante detección de guiños, el usuario puede controlar tanto el ratón como el teclado de un ordenador interactuando con él. Adicionalmente, se han incluido más funcionalidades en el software desarrollado que posibilitan el desarrollo de más funcionalidades de control domótico o entrenamiento en el control de sillas de ruedas adaptadas. 
TactileCom - Sistema de sustitución sensorial TactileCom es un sistema basado en la combinación directa de dos de las interfaces desarrolladas: interfaz aferente de reconocimiento de voz e interfaz eferente de estimulación sensorial, y un enlace inalámbrico entre ambas. Con estas dos interfaces el sistema completo permite comunicarse utilizando una serie de patrones de voz predefinidos (palabras, conceptos o ideas) con una persona sorda o sordociega, que recibirá la información como estimulación táctil y visual si tiene un cierto grado de visión residual. Esta comunicación puede realizarse siempre y cuando el enlace inalámbrico sea posible aunque los usuarios portadores de cada interfaz no estén en la misma dependencia y, por lo tanto, no exista línea de visión directa entre ellos. Sistema para construcción y uso abierto a los potenciales usuarios interesados. Se proporcionará la información necesaria detallada bajo petición expresa (email: alonso3@tel.uva.es). 
Nuevos sensores para control de dispositivos Se trabaja en el desarrollo de diferentes sensores destinados a detectar actividad muscular. Para ello se está realizando una comparativa entre las señales de electromiograma (EMG) y las de mecanomiograma (MMG) mediante la construcción de un electrodo doble que se encargue de recoger estas dos señales. El objetivo de esta comparativa es estudiar la posible sustitución de la señal de EMG por la de MMG para el control de dispositivos externos. Otros desarrollos En este área de investigación de tecnologías de rehabilitacións se trabaja en más disciplinas, que continuamente se están renovando. El trabajo se extiende al desarrollo de nuevos sensores, sistemas aumentativos y sistemas de control de dispositivos. |
||

|
||
|
Dr. Alonso Alonso Alonso
ETS Ingenieros de Telecomunicación - Universidad de Valladolid |