

|
|
|
Tecnologías de Rehabilitación |
||

|
||
|
Guiado automático para sillas de ruedas En este apartado se recoge información relativa al proyecto que tiene por objeto el guiado de vehículos móviles de forma automática. En concreto el sistema realizado permite guiar, vía radio, el movimiento de una o varias sillas de ruedas, dentro de un entorno controlado. Este proyecto ha sido realizado en el marco de la Escuela Técnica Superior de Ingenieros de Telecomunicación (ETSIT) de la Universidad de Valladolid (UVa). 
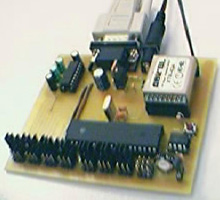

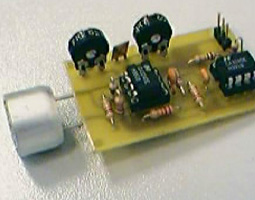
Fotografías del hardware correspondiente a la silla autoguiada. Por orden de aparición de izquierda a derecha: Silla, módulo fijo, módulo móvil y receptor de ultrasonidos. Este proyecto ha sido iniciado y dirigido por el profesor Alonso A. Alonso y en el han contribuido hasta la fecha múltiples personas. En este proyecto se han alcanzado diferentes objetivos, así mismo se sigue trabajando en el desarrollo de diferentes aspectos del proyecto. Las aplicaciones que puede tener este trabajo van desde su empleo en el transporte de materiales en entornos que pueden resultar peligrosos para un conductor humano, hasta conseguir facilitar la movilidad de personas con severas discapacidades, como por ejemplo el uso dentro de un hospital para facilitar el movimiento de los pacientes dentro del mismo. Descripción del proyecto El sistema desarrollado realiza el posicionamiento del elemento móvil mediante trilateración de ultrasonidos, para ello se emplea un emisor en el elemento móvil y tres balizas receptoras fijas, situadas dentro de espacio cerrado. La posición del elemento móvil será calculada mediante la medida del tiempo que tarda cada una de las balizas en recibir el pulso. El ángulo de orientación del elemento móvil se deduce mediante el empleo de una brújula digital, integrada en el mismo.  Representación del sistema de autoguiado. El hardware que compone el sistema es el siguiente: • Un ordenador central en el que se encuentra el software encargado de guiar a cada uno de los elementos móviles del sistema. • Un equipo electrónico, denominado módulo fijo, conectado al ordenador central por una línea RS-232, a las balizas receptoras de ultrasonidos mediante cables y al equipo receptor de cada elemento móvil mediante un enlace de radio. • Un equipo electrónico denominado, módulo móvil, en cada uno de los elementos móviles del sistema. Este equipo consta de: - Un transmisor-receptor radio para comunicarse con el módulo fijo. - Un transmisor de pulsos de ultrasonidos, que envía estos pulsos a las diferentes balizas. • Tres balizas receptoras en cada habitación en la que se emplee el sistema. • Un equipo electrónico denominado, módulo interfaz, instalado en el elemento móvil. Este equipo es el encargado de conectar el elmento móvil con el módulo móvil. • El elemento móvil, que en este caso es un prototipo de silla de ruedas, propulsado por dos motores. Para conseguir el funcionamiento para el que ha sido diseñado, el sistema posee el siguiente software: • Software de control, desarrollado mediante Visual Basic 6.0, disponible en el ordeneador central del sistema. • Rutinas en lenguaje ensamblador, empleadas para conseguir el rendimiento y funcionamiento buscado en los diferentes microcontroladores PIC, que se encuentran integrados en los módulos hardware. 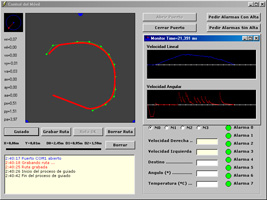
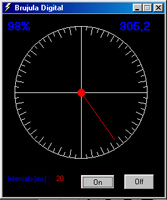
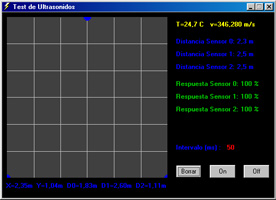
Interfaces del software de control. De izquierda a derecha: ventana principal, brújula digital y test de ultrasonidos. Objetivos alcanzados en el proyecto Mediante el trabajo llevado a cabo en diferentes proyectos realizados por alumnos de la ETSIT, se han alcanzado los siguientes objetivos en el desarrollo de la silla autoguiada: • Mejoras en el software de control que han permitido dotar a la silla de diferentes funcionalidades, como son la posibilidad de evitar obstaculos o la capacidad de gestionar una serie de rutas pregrabadas. Así mismo se han incluido diferentes sistemas de alarma para avisar al usuario de la silla de los posible obstáculos que ésta encuentre. • Integración de un sistema de detección de choques, basado en receptores y emisores de infrarrojos. • Se ha construido un elemento móvil alternativo de tipo microbot, compatible con el hardware desarrollado para la silla autoguiada. Este trabajo ha permitido el desarrollo de un prototipo con un menor consumo de energía y un tamaño más reducido que el prototipo realizado para la silla autoguiada. |
||

|
||
|
Dr. Alonso Alonso Alonso
ETS Ingenieros de Telecomunicación - Universidad de Valladolid |