

|
|
|
Tecnologías de Rehabilitación |
||

|
||

Control adaptado para sillas de ruedas Dirigido a las personas con discapacidades motoras severas o grandes problemas de movilidad se ha desarrollado un dispositivo de movilidad basado en una silla de ruedas eléctrica comercial. El sistema basado en el control utilizando las interfaces aferentes de adquisición de señales biomecánicas permite a un usuario tener total control de la silla de ruedas empleando, únicamente, guiños voluntarios de los ojos. Para conseguir un equipo lo más funcional posible se pretende que sea completamente operativo, adaptado a la discapacidad con una interfaz adecuada, robusto para que aguante el funcionamiento diario, con medidas de seguridad para garantizar la integridad del usuario, con un sistema de guiado universal adaptable a cualquier silla de ruedas comercial controlada con joystick y fácilmente manejable permitiendo un alto grado de aprendizaje e incorporando opciones de guiado asistido. Sistema A continuación se presenta un diagrama de bloques con todos los elementos que componen el sistema de movilidad, incluyendo la interfaz adaptada, el sistema de procesado y el hardware necesario. 
El sistema incorpora una plataforma hardware Arduino que realiza todo el procesado necesario con ayuda de su microcontrolador, se encarga de de gestionar la detección de órdenes, el control de la dirección y la velocidad y la detección de obstáculos. En lo que respecta al hardware, aparte de la interfaz y el sistema de alimentación, el control del joystick se hace de manera mecánica y externa al mismo mediante un sistema de motores y la detección de obstáculos mediante ultrasonidos emplea una red de tres sensores, laterales y frontal. 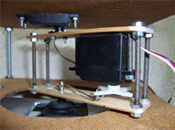
Control de la silla Tras el diseño de sistemas electrónicos encargados del control de la silla de ruedas mediante la sintetización de las señales generadas por el joystick (sistema de bobinas), se decidió implementar un sistema mecánico externo de manera que se garantizase la vida útil del dispositivo y se universalizase el diseño. Con este control mecánico, se independizaba la arquitectura interna del joystick y la generación de señales del sistema de control de la silla de ruedas desarrollado del protocolo específico de control de cada silla de ruedas. El control mecánico está basado en una estructura que incorpora dos servomotores para el control de la dirección y la velocidad de manera independiente, permitiendo una total movilidad del joystick. Para el control se han implementado diferentes órdenes básicas basadas en distintas combinaciones de guiños consecutivos o simultáneos. Así se permite avanzar, retroceder, girar sobre la posición actual a ambos lados y parar, además de otras funcionalidades de facilitación del guiado. 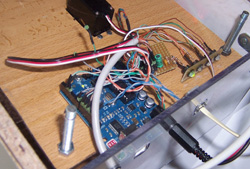
Ayudas en el guiado y detección de obstáculos La red de sensores para detección de obstáculos implementada realiza un análisis de los objetos cercanos para evitar tanto una colisión frontal como lateral. Esta detección se hace basado en los parámetros de distancia y tiempo para una posible colisión, de manera que cuando se detecta un obstáculo a una distancia inferior a 50 centímetros o el tiempo posible colisión frontal es de 2 segundos o lateral de 3 segundos se realiza una deceleración progresiva. Además, si se detecta un obstáculo a menos de 5 centímetros la silla se para e impide reanudar la marcha en esa dirección hasta que el obstáculo desaparece. Las ayudas al guiado implementadas permiten, bajo demanda del usuario, realizar un seguimiento de paredes si la referencia se encuentra a menos de 50 sentímetros del usuario y, adicionalmente, se permiten pequeñios giros mientras se produce el avance de la silla a modo de volante. |
||

|
||
|
Dr. Alonso Alonso Alonso
ETS Ingenieros de Telecomunicación - Universidad de Valladolid |