

|
|
|
Tecnologías de Rehabilitación |
||

|
||
|
Adquisición de señales biomecánicas 
La interfaz de señales biomecánicas está centrada en la detección de movimientos residuales de personas con discapacidad motora severa, con el fin de que puedan controlarse diferentes sistemas domóticos, robóticos o entonos virtuales. En este caso, la interfaz desarrollada permite el reconocimiento de guiños voluntarios de los ojos, obtenidos a partir del movimiento en el músculo orbicularis oculi, ya que es una habilidad que queda remanente en diferentes casos de discapacidad motora severa, en función del nivel de lesión. Empleando esta interfaz, y basados en la detección de estas señales, se han desarrollado diferentes sistemas de propósito general o específico que permiten a un usuario controlar una silla de ruedas eléctrica, un robot de vigilancia en entornos controlados o un ordenador personal a partir de un software de comunicación aumentativa. Para este cometido se han diseñado diferentes prototipos empleando distintos principios de funcionamiento, además, de la detección que podría hacerse empleando un detector de señales bioeléctricas sobre el músculo orbicularis oculi. Sensores ópticos de reflexión 
La detección con sensores ópticos de reflexión se consigue utilizando los dispositivos comerciales CNY70. Estos dispositivos incorporan un led infrarrojo y un fotodiodo sensible a la luz infrarroja colocados de manera paralela, de esta forma, se detectará la luz reflejada en la superficie enfrentada. 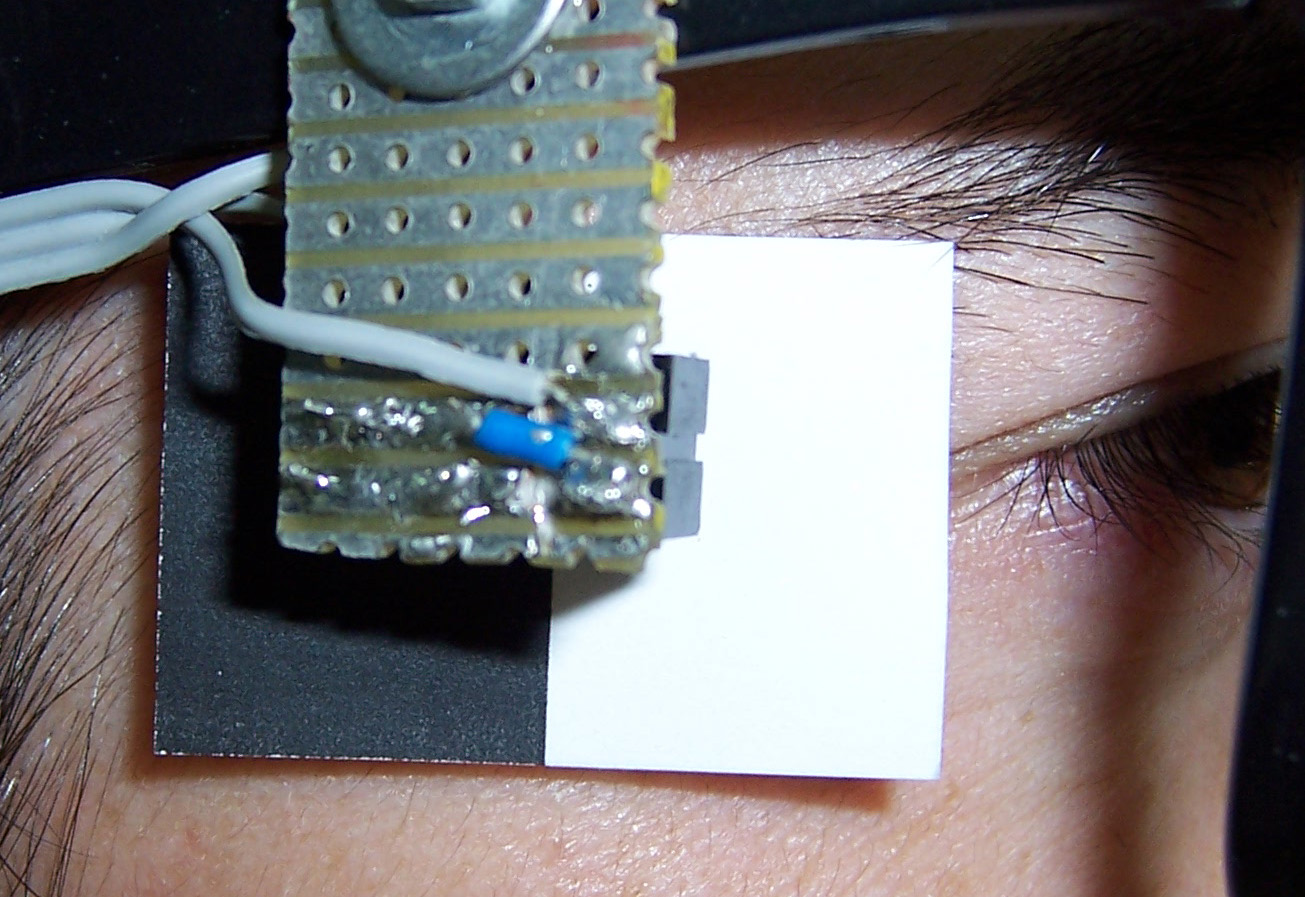
El funcionamiento de este sensor sobre la superficie de la piel requiere el uso de un elemento adicional: una pegatina bicolor, blanca y negra, de forma que el movimiento realizado produzca un cambio de color en la zona de acción del sensor. La señal de salida de los sensores debe acondicionarse para poder ser procesada por un sistema digital. Esta acondicionamiento es muy sencillo, ya que se utilizarán señales digitales que serán, posteriormente, procesadas en una plataforma Arduino. Sensores ópticos de detección de patrones 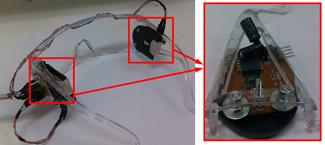
En este caso, la detección de guiños se realizado con un sistema de detección de patrones basado en los circuitos empleados en los ratones ópticos convencionales para ordenadores personales. Este dispositivo incorpora un fotosensor o cámara que envía el patrón observado a un procesador digital de señales (DSP), que procesa y compara el patrón con los anteriores, obteniendo el movimiento realizado, dirección y cantidad de desplazamiento. En contraposición al caso anterior, con estos sensores no será necesario el uso de elementos adicionales para conseguir un correcto funcionamiento. Simplemente el circuito integrado con cámara, un led de iluminación y un prisma con lente que enfoque el haz de luz hacia la superficie de interés. Nuevamente, el procesado será realizado mediante una plataforma hardware Arduino. Esta plataforma se podrá configurar para evitar falsas detecciones en función del movimiento registrado. 
Sensores de vibración La detección de guiños puede hacerse también mecánicamente mediante la vibración que se produce en el entorno ocular. En este caso, se ha empleado un sensor de tipo piezoeléctrico bimorfo que responde a deformaciones mecánicas con una diferencia de potencial entre sus terminales. Para este tipo de sensores, además, de la plataforma Arduino de procesado, será necesario realizar un acondicionamiento externo para conseguir una señal interpretable por el sistema digital. En este caso se ha empleado un circuito de acondicionamiento basado en un amplificador inversor y un integrado 555. 
Procesado Como se ha indicado anteriormente para el procesado se empleará en todos los casoso un plataforma hardware Arduino que incorpora en una placa de circuito impreso todos los elementos necesarios para hacer funcionar un microcontrolador y los correspondientes periféricos de programación del mismo. La programación del mismo se realiza mediante código C y posee un entorno de desarrollo propio donde están incorporados todos los elementos necesarios. En función del sensor utilizado se emplea una técnica de procesado u otra, pero en todos los casos se permite configurar tanto la posición de detección de guiño como la temporización entre guiños consecutivos cuando se emplean ordenes más complejas. |
||

|
||
|
Dr. Alonso Alonso Alonso
ETS Ingenieros de Telecomunicación - Universidad de Valladolid |